Công nghệ Encoder
Tìm kiếm
Thông tin chung về bộ mã hóa quay
Bộ mã hóa quay là các cảm biến chuyển đổi chuyển động thành tín hiệu điện.
Có hai biến thể: Bộ mã hóa trục quay và bộ mã hóa tuyến tính.
Bộ mã hóa trục quay phản ứng với chuyển động quay, trong khi bộ mã hóa tuyến tính được sử dụng để theo dõi chuyển động dọc.
Nếu bộ mã hóa quay được kết hợp với các thiết bị truyền lực cơ học, chẳng hạn như bộ truyền động thanh răng và bánh răng, bánh xe đo hoặc trục quay thì các chuyển động tuyến tính, tốc độ quay và vị trí cũng có thể được ghi lại bằng các bộ mã hóa này.
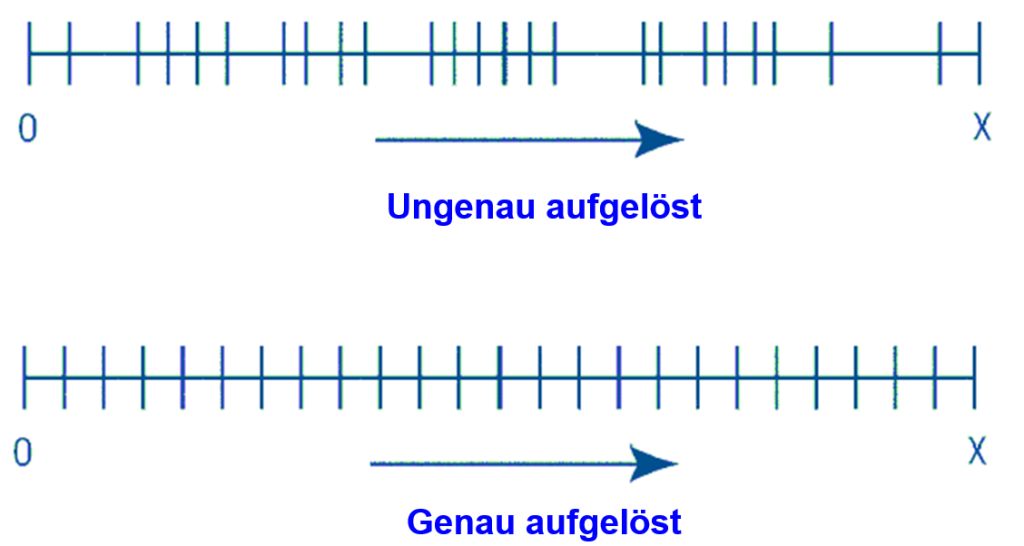
Bộ mã hóa quay có sẵn với nhiều đầu ra. Bộ mã hóa quay lũy tiến tạo ra một loạt xung do một chuyển động duy nhất. Các xung này có thể được sử dụng để đo tốc độ quay hoặc được truyền tới bộ đếm để theo dõi vị trí. Bộ mã hóa quay tuyệt đối tạo ra dữ liệu đa bit kỹ thuật số cho phép xác định vị trí hiện tại ngay lập tức.
Bộ mã hóa quay được sử dụng trong nhiều ứng dụng. Chúng được sử dụng với bộ chuyển đổi phản hồi để lấy phản hồi cho hệ thống điều khiển tốc độ động cơ, làm cảm biến trong thiết bị cắt và định vị cũng như làm đầu vào cho tốc độ quay và hệ thống điều khiển tốc độ xe.